
近期,信息學(xué)院(人工智能學(xué)院)盧昊副教授研究團隊聯(lián)合中國林業(yè)科學(xué)研究院、瑞士聯(lián)邦森林、雪與景觀研究所(WSL)等機構(gòu)研究人員,在遙感領(lǐng)域頂刊《Remote Sensing of Environment》(中國科學(xué)院一區(qū)Top,IF=11.1)上發(fā)表題為"Towards a point cloud understanding framework for forest scene semantic segmentation across forest types and sensor platforms"的研究成果。該研究針對復(fù)雜森林場景,提出了大規(guī)模三維點云理解的神經(jīng)網(wǎng)絡(luò)模型Sen-net,實現(xiàn)了點云多種組分的高精度語義分割。
森林場景往往具有復(fù)雜三維結(jié)構(gòu),包括林木(含樹干、樹枝、樹葉)和其他(草、灌、地面等)多種成分,這些成分對森林生態(tài)系統(tǒng)的作用和影響是不同的。通過遙感技術(shù)測量這些成分,對定量、精確、完整地理解森林生態(tài)過程具有重要意義。無人機激光雷達(LiDAR)三維點云是進行森林三維結(jié)構(gòu)刻畫的有力工具,但復(fù)雜的成分和結(jié)構(gòu)使點云數(shù)據(jù)難以采用傳統(tǒng)的特征工程、啟發(fā)式方法或機器學(xué)習(xí)進行高精度語義分割。
團隊基于長期在三維點云處理方面的研究,充分發(fā)揮“遙感—林草—AI”學(xué)科交叉融合的優(yōu)勢,發(fā)展了數(shù)據(jù)驅(qū)動的深度神經(jīng)網(wǎng)絡(luò)模型,從森林場景三維點云有效分離出樹葉、木質(zhì)成分、低矮植被及地面。針對這一目標(biāo):
(1)獨立構(gòu)建了大規(guī)模森林場景點云標(biāo)注數(shù)據(jù)集Lin3D。針對國際上該領(lǐng)域標(biāo)注數(shù)據(jù)稀缺的問題,構(gòu)建了總面積超過20000 m2、包含不同氣候帶、森林類型、樹種、林分密度、地形條件的數(shù)據(jù)集Lin3D。
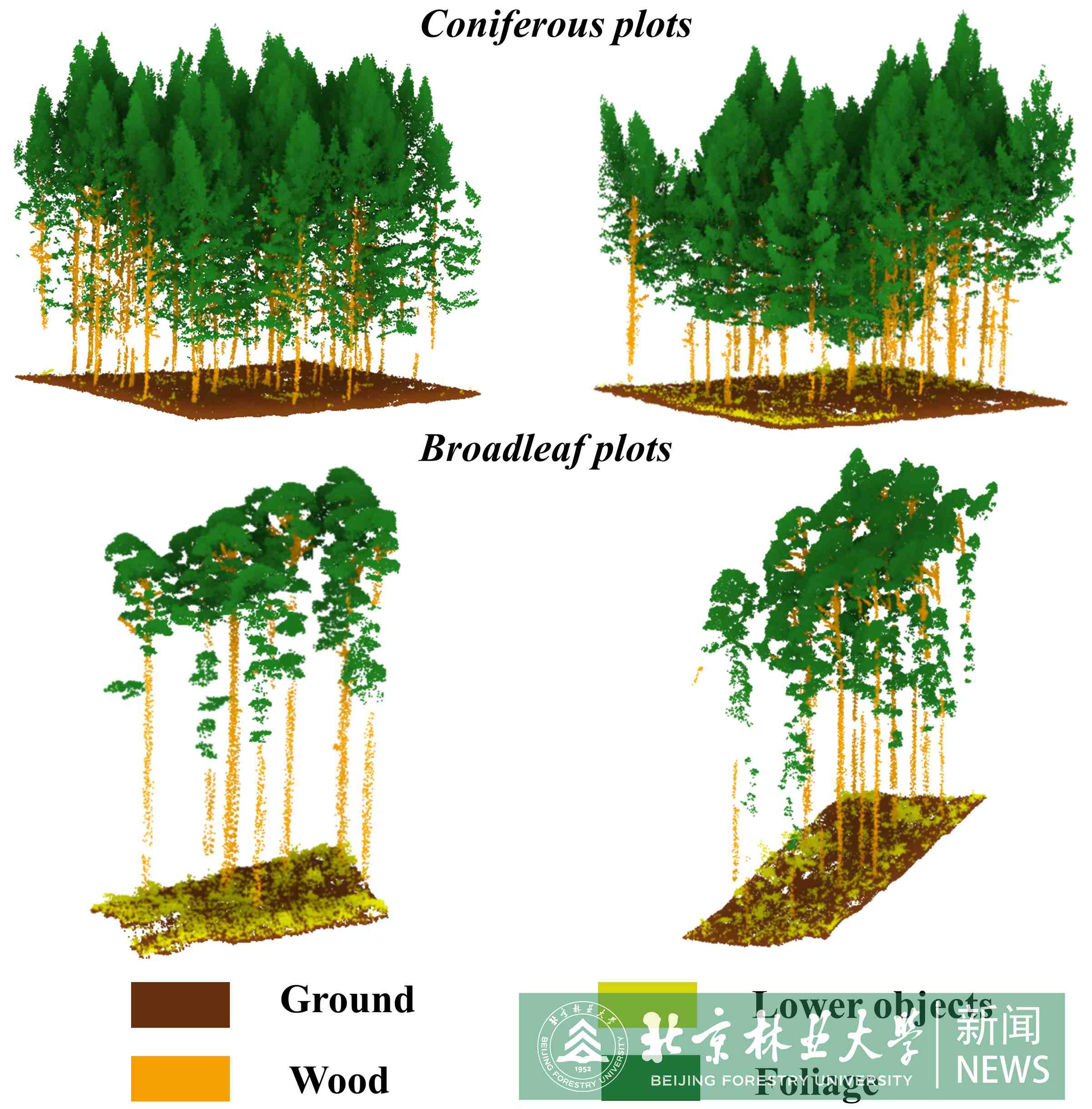
圖1. 大規(guī)模數(shù)據(jù)集Lin3D示例
(2)設(shè)計和訓(xùn)練了專門針對森林場景三維點云理解的神經(jīng)網(wǎng)絡(luò)模型Sen-net。結(jié)合長距離上下文信息與數(shù)據(jù)集先驗知識,基于語義驅(qū)動融合多尺度特征,通過自適應(yīng)學(xué)習(xí)方式,有效將森林場景“端到端”地分割為樹葉、木質(zhì)成分、低矮植被及地面組分。

圖2. Sen-net網(wǎng)絡(luò)架構(gòu)
在Lin3D數(shù)據(jù)集上,Sen-net總體正確率、平均交并比分別達到97.6%和85.1%;在國際公開數(shù)據(jù)集上,總體正確率、平均交并比分別達到94.5%和78.2%,說明Sen-net在準(zhǔn)確性和泛化能力方面表現(xiàn)出色,優(yōu)于同類方法。該網(wǎng)絡(luò)無需調(diào)節(jié)參數(shù),使用方便,泛化能力強,適用于森林場景點云分析,并可作為森林場景點云處理算法的基礎(chǔ)性框架,該研究成果表明團隊在這一領(lǐng)域的研究處于國際前沿水平。
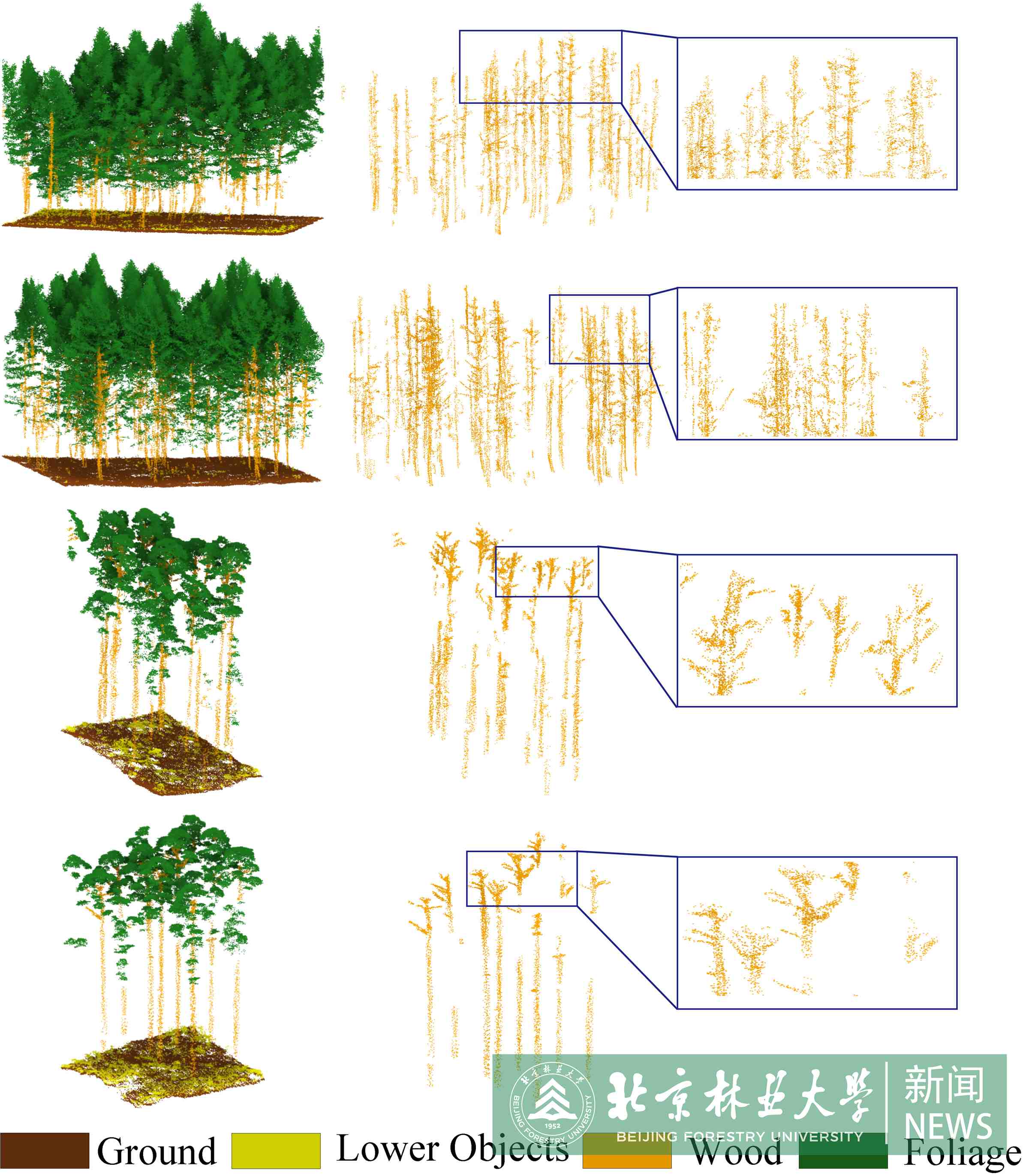
圖3. Sen-net對Lin3D數(shù)據(jù)的分割結(jié)果

圖4. Sen-net對幾個國際公開數(shù)據(jù)的分割結(jié)果
盧昊副教授為第一作者,信息學(xué)院2024屆碩士畢業(yè)生李博文和中國林業(yè)科學(xué)研究院資源信息研究所龐勇研究員為通訊作者。
該研究受到國家重點研發(fā)計劃項目“森林資源激光雷達遙感動態(tài)監(jiān)測與蓄積量估測技術(shù)聯(lián)合研發(fā)”(2020YFE0200800)、國家自然科學(xué)基金項目“多源機載LiDAR數(shù)據(jù)融合的落葉松表型分析方法研究”(42001376)和雄安新區(qū)科技創(chuàng)新專項“雄安新區(qū)綠色生態(tài)城市智慧森林經(jīng)營關(guān)鍵技術(shù)應(yīng)用與示范”(2023XAGG0065)的資助。
論文鏈接:https://www.sciencedirect.com/science/article/abs/pii/S0034425724006175